High Availability: Difference between revisions
No edit summary |
No edit summary |
||
| (11 intermediate revisions by the same user not shown) | |||
| Line 9: | Line 9: | ||
provide such services, it is very important that they are available | provide such services, it is very important that they are available | ||
most of the time. | most of the time. | ||
We can mathematically define the availability as the ratio of (A) the | We can mathematically define the availability as the ratio of (A), the | ||
total time a service is capable of being used during a given interval | total time a service is capable of being used during a given interval | ||
to (B) the length of the interval. It is normally expressed as a | to (B), the length of the interval. It is normally expressed as a | ||
percentage of uptime in a given year. | percentage of uptime in a given year. | ||
Table 1. Availability - Downtime per Year | Table 1. Availability - Downtime per Year | ||
| Line 30: | Line 30: | ||
There are several ways to increase availability. The most elegant | There are several ways to increase availability. The most elegant | ||
solution is to rewrite your software, so that you can run it on | solution is to rewrite your software, so that you can run it on | ||
several | several hosts at the same time. The software itself needs to have a way | ||
to detect errors and do failover. | to detect errors and do failover. If you only want to serve read-only | ||
want to serve read-only web pages. | web pages, then this is relatively simple. However, this is generally complex | ||
sometimes impossible because you cannot modify the software | and sometimes impossible, because you cannot modify the software yourself. The | ||
yourself. The following solutions works without modifying the | following solutions works without modifying the software: | ||
software: | |||
Use reliable “server” components | Use reliable “server” components | ||
Computer components with same functionality can have varying | Computer components with the same functionality can have varying | ||
reliability numbers, depending on the component quality. Most vendors | reliability numbers, depending on the component quality. Most vendors | ||
sell components with higher reliability as “server” components - | sell components with higher reliability as “server” components - | ||
| Line 43: | Line 42: | ||
Eliminate single point of failure (redundant components) | Eliminate single point of failure (redundant components) | ||
use an uninterruptible power supply (UPS) | use an uninterruptible power supply (UPS) | ||
use redundant power supplies | use redundant power supplies in your servers | ||
use ECC-RAM | use ECC-RAM | ||
use redundant network hardware | use redundant network hardware | ||
| Line 55: | Line 54: | ||
Virtualization environments like Proxmox VE make it much easier to reach | Virtualization environments like Proxmox VE make it much easier to reach | ||
high availability because they remove the “hardware” dependency. They | high availability because they remove the “hardware” dependency. They | ||
also support | also support the setup and use of redundant storage and network | ||
devices | devices, so if one host fails, you can simply start those services on | ||
another host within your cluster. | another host within your cluster. | ||
Better still, Proxmox VE provides a software stack called ha-manager, | |||
which can do that automatically for you. It is able to automatically | which can do that automatically for you. It is able to automatically | ||
detect errors and do automatic failover. | detect errors and do automatic failover. | ||
Proxmox VE ha-manager works like an “automated” administrator. First, you | Proxmox VE ha-manager works like an “automated” administrator. First, you | ||
configure what resources (VMs, containers, …) it should | configure what resources (VMs, containers, …) it should | ||
manage. ha-manager | manage. Then, ha-manager observes the correct functionality, and handles | ||
service failover to another node in case of errors. ha-manager can | service failover to another node in case of errors. ha-manager can | ||
also handle normal user requests which may start, stop, relocate and | also handle normal user requests which may start, stop, relocate and | ||
migrate a service. | migrate a service. | ||
But high availability comes at a price. High quality components are | But high availability comes at a price. High quality components are | ||
more expensive, and making them redundant | more expensive, and making them redundant doubles the costs at | ||
least. Additional spare parts increase costs further. So you should | least. Additional spare parts increase costs further. So you should | ||
carefully calculate the benefits, and compare with those additional | carefully calculate the benefits, and compare with those additional | ||
costs. | costs. | ||
Increasing availability from 99% to 99.9% is relatively | Increasing availability from 99% to 99.9% is relatively | ||
simple. But increasing availability from 99.9999% to 99.99999% is very | |||
hard and costly. ha-manager has typical error detection and failover | hard and costly. ha-manager has typical error detection and failover | ||
times of about 2 minutes, so you can get no more than 99.999% | times of about 2 minutes, so you can get no more than 99.999% | ||
| Line 90: | Line 89: | ||
resource. A resource (also called “service”) is uniquely | resource. A resource (also called “service”) is uniquely | ||
identified by a service ID (SID), which consists of the resource type | identified by a service ID (SID), which consists of the resource type | ||
and | and a type specific ID, for example vm:100. That example would be a | ||
resource of type vm (virtual machine) with the ID 100. | resource of type vm (virtual machine) with the ID 100. | ||
For now we have two important resources types - virtual machines and | For now we have two important resources types - virtual machines and | ||
containers. One basic idea here is that we can bundle related software | containers. One basic idea here is that we can bundle related software | ||
into such VM or container, so there is no need to compose one big | into such a VM or container, so there is no need to compose one big | ||
service from other services, | service from other services, as was done with rgmanager. In | ||
general, a HA managed resource should not depend on other resources. | general, a HA managed resource should not depend on other resources. | ||
Management Tasks | Management Tasks | ||
| Line 101: | Line 100: | ||
first step is to enable HA for a resource. This is done by adding the | first step is to enable HA for a resource. This is done by adding the | ||
resource to the HA resource configuration. You can do this using the | resource to the HA resource configuration. You can do this using the | ||
GUI, or simply use the command line tool, for example: | GUI, or simply use the command-line tool, for example: | ||
# ha-manager add vm:100 | # ha-manager add vm:100 | ||
The HA stack now tries to start the resources and | The HA stack now tries to start the resources and keep them | ||
running. Please note that you can configure the “requested” | running. Please note that you can configure the “requested” | ||
resources state. For example you may want | resources state. For example you may want the HA stack to stop the | ||
resource: | resource: | ||
# ha-manager set vm:100 --state stopped | # ha-manager set vm:100 --state stopped | ||
| Line 113: | Line 112: | ||
automatically forward the commands to the HA stack, so | automatically forward the commands to the HA stack, so | ||
# qm start 100 | # qm start 100 | ||
simply sets the requested state to started. | simply sets the requested state to started. The same applies to qm | ||
stop, which sets the requested state to stopped. | stop, which sets the requested state to stopped. | ||
The HA stack works fully asynchronous and needs to communicate | The HA stack works fully asynchronous and needs to communicate | ||
with other cluster members. | with other cluster members. Therefore, it takes some seconds until you see | ||
the result of such actions. | the result of such actions. | ||
To view the current HA resource configuration use: | To view the current HA resource configuration use: | ||
| Line 132: | Line 131: | ||
This uses online migration and tries to keep the VM running. Online | This uses online migration and tries to keep the VM running. Online | ||
migration needs to transfer all used memory over the network, so it is | migration needs to transfer all used memory over the network, so it is | ||
sometimes faster to stop VM, then restart it on the new node. This can be | sometimes faster to stop the VM, then restart it on the new node. This can be | ||
done using the relocate command: | done using the relocate command: | ||
# ha-manager relocate vm:100 node2 | # ha-manager relocate vm:100 node2 | ||
| Line 139: | Line 138: | ||
# ha-manager remove vm:100 | # ha-manager remove vm:100 | ||
This does not start or stop the resource. | This does not start or stop the resource. | ||
But all HA related | But all HA related tasks can be done in the GUI, so there is no need to | ||
use the command line at all. | use the command line at all. | ||
How It Works | How It Works | ||
| Line 150: | Line 149: | ||
the current manager status file and executes the respective commands. | the current manager status file and executes the respective commands. | ||
pve-ha-crm | pve-ha-crm | ||
The cluster resource manager (CRM), which makes the cluster wide | The cluster resource manager (CRM), which makes the cluster-wide | ||
decisions. It sends commands to the LRM, processes the results, | decisions. It sends commands to the LRM, processes the results, | ||
and moves resources to other nodes if something fails. The CRM also | and moves resources to other nodes if something fails. The CRM also | ||
handles node fencing. | handles node fencing. | ||
Locks in the LRM & CRMLocks are provided by our distributed configuration file system (pmxcfs). | Locks in the LRM & CRMLocks are provided by our distributed configuration file system (pmxcfs). | ||
They are used to guarantee that each LRM is active once and working. As | They are used to guarantee that each LRM is active once and working. As an | ||
LRM only executes actions when it holds its lock, we can mark a failed node | LRM only executes actions when it holds its lock, we can mark a failed node | ||
as fenced if we can acquire its lock. This lets us | as fenced if we can acquire its lock. This then lets us recover any failed | ||
HA services securely without any interference from the now unknown failed node. | HA services securely without any interference from the now unknown failed node. | ||
This all gets supervised by the CRM which holds | This all gets supervised by the CRM which currently holds the manager master | ||
lock. | lock. | ||
Service States | Service States | ||
The CRM | The CRM uses a service state enumeration to record the current service | ||
state. | state. This state is displayed on the GUI and can be queried using | ||
the ha-manager command line tool: | the ha-manager command-line tool: | ||
# ha-manager status | # ha-manager status | ||
quorum OK | quorum OK | ||
| Line 190: | Line 189: | ||
LRM that the service is running. | LRM that the service is running. | ||
fence | fence | ||
Wait for node fencing | Wait for node fencing as the service node is not inside the quorate cluster | ||
partition). | partition (see Fencing). | ||
As soon as node gets fenced successfully the service will be placed into the | |||
recovery state. | |||
recovery | |||
Wait for recovery of the service. The HA manager tries to find a new node where | |||
the service can run on. This search depends not only on the list of online and | |||
quorate nodes, but also if the service is a group member and how such a group | |||
is limited. | |||
As soon as a new available node is found, the service will be moved there and | |||
initially placed into stopped state. If it’s configured to run the new node | |||
will do so. | |||
freeze | freeze | ||
Do not touch the service state. We use this state while we reboot a | Do not touch the service state. We use this state while we reboot a | ||
node, or when we restart the LRM daemon | node, or when we restart the LRM daemon | ||
(see Package Updates). | (see Package Updates). | ||
ignored | |||
Act as if the service were not managed by HA at all. | |||
Useful, when full control over the service is desired temporarily, without | |||
removing it from the HA configuration. | |||
migrate | migrate | ||
Migrate service (live) to other node. | Migrate service (live) to other node. | ||
| Line 209: | Line 220: | ||
Local Resource Manager | Local Resource Manager | ||
The local resource manager (pve-ha-lrm) is started as a daemon on | The local resource manager (pve-ha-lrm) is started as a daemon on | ||
boot and waits until the HA cluster is quorate and thus cluster wide | boot and waits until the HA cluster is quorate and thus cluster-wide | ||
locks are working. | locks are working. | ||
It can be in three states: | It can be in three states: | ||
| Line 222: | Line 233: | ||
file in /etc/pve/ha/manager_status and determines the commands it | file in /etc/pve/ha/manager_status and determines the commands it | ||
has to execute for the services it owns. | has to execute for the services it owns. | ||
For each command a worker gets started, | For each command a worker gets started, these workers are running in | ||
parallel and are limited to at most 4 by default. This default setting | parallel and are limited to at most 4 by default. This default setting | ||
may be changed through the datacenter configuration key max_worker. | may be changed through the datacenter configuration key max_worker. | ||
| Line 228: | Line 239: | ||
the CRM. | the CRM. | ||
Maximum Concurrent Worker Adjustment TipsThe default value of at most 4 concurrent workers may be unsuited for | Maximum Concurrent Worker Adjustment TipsThe default value of at most 4 concurrent workers may be unsuited for | ||
a specific setup. For example | a specific setup. For example, 4 live migrations may occur at the same | ||
time, which can lead to network congestions with slower networks and/or | time, which can lead to network congestions with slower networks and/or | ||
big (memory wise) services. | big (memory wise) services. Also, ensure that in the worst case, congestion is | ||
at a minimum, even if this means lowering the max_worker value. On the | |||
have a particularly powerful high end setup you may also want to increase it. | contrary, if you have a particularly powerful, high-end setup you may also want | ||
Each command requested by the CRM is uniquely identifiable by | to increase it. | ||
the worker | Each command requested by the CRM is uniquely identifiable by a UID. When | ||
the worker finishes, its result will be processed and written in the LRM | |||
status file /etc/pve/nodes/<nodename>/lrm_status. There the CRM may collect | status file /etc/pve/nodes/<nodename>/lrm_status. There the CRM may collect | ||
it and let its state machine - respective the commands output - act on it. | it and let its state machine - respective to the commands output - act on it. | ||
The actions on each service between CRM and LRM are normally always synced. | The actions on each service between CRM and LRM are normally always synced. | ||
This means that the CRM requests a state uniquely marked by | This means that the CRM requests a state uniquely marked by a UID, the LRM | ||
then executes this action one time and writes back the result, also | then executes this action one time and writes back the result, which is also | ||
identifiable by the same UID. This is needed so that the LRM does not | identifiable by the same UID. This is needed so that the LRM does not | ||
execute an outdated command. | |||
The only exceptions to this behaviour are the stop and error commands; | |||
these two do not depend on the result produced and are executed | |||
always in the case of the stopped state and once in the case of | always in the case of the stopped state and once in the case of | ||
the error state. | the error state. | ||
| Line 264: | Line 276: | ||
lost agent lock | lost agent lock | ||
The CRM lost its lock, this means a failure happened and quorum was lost. | The CRM lost its lock, this means a failure happened and quorum was lost. | ||
Its main task is to manage the services which are configured to be highly | |||
available and try to always enforce the requested state. For example, a | available and try to always enforce the requested state. For example, a | ||
service with the requested state started will be started if its not | service with the requested state started will be started if its not | ||
already running. If it crashes it will be automatically started again. | already running. If it crashes it will be automatically started again. | ||
Thus the CRM dictates the actions | Thus the CRM dictates the actions the LRM needs to execute. | ||
When | When a node leaves the cluster quorum, its state changes to unknown. | ||
If the current CRM then | If the current CRM can then secure the failed node’s lock, the services | ||
will be stolen and restarted on another node. | will be stolen and restarted on another node. | ||
When a cluster member determines that it is no longer in the cluster | When a cluster member determines that it is no longer in the cluster | ||
quorum, the LRM waits for a new quorum to form. As long as there is no | quorum, the LRM waits for a new quorum to form. As long as there is no | ||
quorum the node cannot reset the watchdog. This will trigger a reboot | quorum the node cannot reset the watchdog. This will trigger a reboot | ||
after the watchdog | after the watchdog times out (this happens after 60 seconds). | ||
HA Simulator | |||
By using the HA simulator you can test and learn all functionalities of the | |||
Proxmox VE HA solutions. | |||
By default, the simulator allows you to watch and test the behaviour of a | |||
real-world 3 node cluster with 6 VMs. You can also add or remove additional VMs | |||
or Container. | |||
You do not have to setup or configure a real cluster, the HA simulator runs out | |||
of the box. | |||
Install with apt: | |||
apt install pve-ha-simulator | |||
You can even install the package on any Debian-based system without any | |||
other Proxmox VE packages. For that you will need to download the package and | |||
copy it to the system you want to run it on for installation. When you install | |||
the package with apt from the local file system it will also resolve the | |||
required dependencies for you. | |||
To start the simulator on a remote machine you must have an X11 redirection to | |||
your current system. | |||
If you are on a Linux machine you can use: | |||
ssh root@<IPofPVE> -Y | |||
On Windows it works with mobaxterm. | |||
After connecting to an existing Proxmox VE with the simulator installed or | |||
installing it on your local Debian-based system manually, you can try it out as | |||
follows. | |||
First you need to create a working directory where the simulator saves its | |||
current state and writes its default config: | |||
mkdir working | |||
Then, simply pass the created directory as a parameter to pve-ha-simulator: | |||
pve-ha-simulator working/ | |||
You can then start, stop, migrate the simulated HA services, or even check out | |||
what happens on a node failure. | |||
Configuration | Configuration | ||
The HA stack is well integrated into the Proxmox VE API. So, for example, | The HA stack is well integrated into the Proxmox VE API. So, for example, | ||
HA can be configured via the ha-manager command line interface, or | HA can be configured via the ha-manager command-line interface, or | ||
the Proxmox VE web interface - both interfaces provide an easy way to | the Proxmox VE web interface - both interfaces provide an easy way to | ||
manage HA. Automation tools can use the API directly. | manage HA. Automation tools can use the API directly. | ||
| Line 287: | Line 329: | ||
The resource configuration file /etc/pve/ha/resources.cfg stores | The resource configuration file /etc/pve/ha/resources.cfg stores | ||
the list of resources managed by ha-manager. A resource configuration | the list of resources managed by ha-manager. A resource configuration | ||
inside that list | inside that list looks like this: | ||
<type>: <name> | <type>: <name> | ||
<property> <value> | <property> <value> | ||
| Line 304: | Line 346: | ||
max_restart: <integer> (0 - N) (default = 1) | max_restart: <integer> (0 - N) (default = 1) | ||
Maximal number of tries to restart the service on a node after its start failed. | Maximal number of tries to restart the service on a node after its start failed. | ||
state: <disabled | enabled | started | stopped> (default = started) | state: <disabled | enabled | ignored | started | stopped> (default = started) | ||
Requested resource state. The CRM reads this state and acts accordingly. | Requested resource state. The CRM reads this state and acts accordingly. | ||
Please note that enabled is just an alias for started. | Please note that enabled is just an alias for started. | ||
| Line 320: | Line 362: | ||
state is error recovery, because it is the only way to move a resource out | state is error recovery, because it is the only way to move a resource out | ||
of the error state. | of the error state. | ||
ignored | |||
The resource gets removed from the manager status and so the CRM and the LRM do | |||
not touch the resource anymore. All {pve} API calls affecting this resource | |||
will be executed, directly bypassing the HA stack. CRM commands will be thrown | |||
away while there source is in this state. The resource will not get relocated | |||
on node failures. | |||
Here is a real world example with one VM and one container. As you see, | Here is a real world example with one VM and one container. As you see, | ||
the syntax of those files is really simple, so it is even | the syntax of those files is really simple, so it is even possible to | ||
read or edit those files using your favorite editor: | read or edit those files using your favorite editor: | ||
Configuration Example (/etc/pve/ha/resources.cfg) | Configuration Example (/etc/pve/ha/resources.cfg) | ||
| Line 329: | Line 377: | ||
ct: 102 | ct: 102 | ||
# Note: use default settings for everything | # Note: use default settings for everything | ||
The above config was generated using the ha-manager command-line tool: | |||
# ha-manager add vm:501 --state started --max_relocate 2 | # ha-manager add vm:501 --state started --max_relocate 2 | ||
# ha-manager add ct:102 | # ha-manager add ct:102 | ||
| Line 356: | Line 404: | ||
behavior. For example, you may want to run a set of services on | behavior. For example, you may want to run a set of services on | ||
node1 if possible. If node1 is not available, you want to run them | node1 if possible. If node1 is not available, you want to run them | ||
equally | equally split on node2 and node3. If those nodes also fail, the | ||
services should run on node4. To achieve this you could set the node | services should run on node4. To achieve this you could set the node | ||
list to: | list to: | ||
| Line 365: | Line 413: | ||
restricted group with said nodes: | restricted group with said nodes: | ||
# ha-manager groupadd mygroup2 -nodes "node1,node2" -restricted | # ha-manager groupadd mygroup2 -nodes "node1,node2" -restricted | ||
The above commands created the following group configuration file: | |||
Configuration Example (/etc/pve/ha/groups.cfg) | Configuration Example (/etc/pve/ha/groups.cfg) | ||
group: prefer_node1 | group: prefer_node1 | ||
| Line 376: | Line 424: | ||
The nofailback options is mostly useful to avoid unwanted resource | The nofailback options is mostly useful to avoid unwanted resource | ||
movements during administration tasks. For example, if you need to | movements during administration tasks. For example, if you need to | ||
migrate a service to a node which | migrate a service to a node which doesn’t have the highest priority in the | ||
group, you need to tell the HA manager to | group, you need to tell the HA manager not to instantly move this service | ||
back by setting the nofailback option. | |||
Another scenario is when a service was fenced and it got recovered to | Another scenario is when a service was fenced and it got recovered to | ||
another node. The admin tries to repair the fenced node and brings it | another node. The admin tries to repair the fenced node and brings it | ||
up online again to investigate the failure | up online again to investigate the cause of failure and check if it runs | ||
stably again. Setting the nofailback flag prevents the recovered services from | |||
recovered services | moving straight back to the fenced node. | ||
Fencing | Fencing | ||
On node failures, fencing ensures that the erroneous node is | On node failures, fencing ensures that the erroneous node is | ||
guaranteed to be offline. This is required to make sure that no | guaranteed to be offline. This is required to make sure that no | ||
resource runs twice when it gets recovered on another node. This is a | resource runs twice when it gets recovered on another node. This is a | ||
really important task, because without, it would not be possible to | really important task, because without this, it would not be possible to | ||
recover a resource on another node. | recover a resource on another node. | ||
If a node | If a node did not get fenced, it would be in an unknown state where | ||
it may have still access to shared resources. This is really | it may have still access to shared resources. This is really | ||
dangerous! | dangerous! Imagine that every network but the storage one broke. Now, | ||
while not reachable from the public network, the VM still runs and | while not reachable from the public network, the VM still runs and | ||
writes to the shared storage. | writes to the shared storage. | ||
If we then simply start up this VM on another node, we would get a | If we then simply start up this VM on another node, we would get a | ||
dangerous race | dangerous race condition, because we write from both nodes. Such | ||
conditions can destroy all VM data and the whole VM could be rendered | |||
unusable. The recovery could also fail if the storage protects | unusable. The recovery could also fail if the storage protects against | ||
multiple mounts. | multiple mounts. | ||
How Proxmox VE Fences | How Proxmox VE Fences | ||
| Line 413: | Line 461: | ||
isolate nodes by disabling complete network traffic on the switch | isolate nodes by disabling complete network traffic on the switch | ||
self fencing using watchdog timers | self fencing using watchdog timers | ||
Watchdog timers | Watchdog timers have been widely used in critical and dependable systems | ||
since the beginning of | since the beginning of microcontrollers. They are often simple, independent | ||
integrated circuits which are used to detect and recover from computer malfunctions. | |||
from computer malfunctions. | |||
During normal operation, ha-manager regularly resets the watchdog | During normal operation, ha-manager regularly resets the watchdog | ||
timer to prevent it from elapsing. If, due to a hardware fault or | timer to prevent it from elapsing. If, due to a hardware fault or | ||
program error, the computer fails to reset the watchdog, the timer | program error, the computer fails to reset the watchdog, the timer | ||
will elapse and | will elapse and trigger a reset of the whole server (reboot). | ||
Recent server motherboards often include such hardware watchdogs, but | Recent server motherboards often include such hardware watchdogs, but | ||
these need to be configured. If no watchdog is available or | these need to be configured. If no watchdog is available or | ||
| Line 433: | Line 480: | ||
# select watchdog module (default is softdog) | # select watchdog module (default is softdog) | ||
WATCHDOG_MODULE=iTCO_wdt | WATCHDOG_MODULE=iTCO_wdt | ||
This configuration is read by the watchdog-mux service, which | This configuration is read by the watchdog-mux service, which loads | ||
the specified module at startup. | the specified module at startup. | ||
Recover Fenced Services | Recover Fenced Services | ||
| Line 447: | Line 494: | ||
of an overloaded node. | of an overloaded node. | ||
On node failure, the CRM distributes services to the | On node failure, the CRM distributes services to the | ||
remaining nodes. This | remaining nodes. This increases the service count on those nodes, and | ||
can lead to high load, especially on small clusters. Please design | can lead to high load, especially on small clusters. Please design | ||
your cluster so that it can handle such worst case scenarios. | your cluster so that it can handle such worst case scenarios. | ||
Start Failure Policy | Start Failure Policy | ||
The start failure policy comes | The start failure policy comes into effect if a service failed to start on a | ||
node | node one or more times. It can be used to configure how often a restart | ||
should be triggered on the same node and how often a service should be | should be triggered on the same node and how often a service should be | ||
relocated so that it | relocated, so that it has an attempt to be started on another node. | ||
The aim of this policy is to circumvent temporary unavailability of shared | The aim of this policy is to circumvent temporary unavailability of shared | ||
resources on a specific node. For example, if a shared storage isn’t available | resources on a specific node. For example, if a shared storage isn’t available | ||
on a quorate node anymore, | on a quorate node anymore, for instance due to network problems, but is still | ||
the relocate policy allows | available on other nodes, the relocate policy allows the service to start | ||
nonetheless. | |||
There are two service start recover policy settings which can be configured | There are two service start recover policy settings which can be configured | ||
specific for each resource. | specific for each resource. | ||
max_restart | max_restart | ||
Maximum number of | Maximum number of attempts to restart a failed service on the actual | ||
node. The default is set to one. | node. The default is set to one. | ||
max_relocate | max_relocate | ||
Maximum number of | Maximum number of attempts to relocate the service to a different node. | ||
A relocate only happens after the max_restart value is exceeded on the | A relocate only happens after the max_restart value is exceeded on the | ||
actual node. The default is set to one. | actual node. The default is set to one. | ||
| Line 473: | Line 521: | ||
repeated. | repeated. | ||
Error Recovery | Error Recovery | ||
If after all | If, after all attempts, the service state could not be recovered, it gets | ||
placed in an error state. In this state the service won’t get touched | placed in an error state. In this state, the service won’t get touched | ||
by the HA stack anymore. The only way out is disabling a service: | by the HA stack anymore. The only way out is disabling a service: | ||
# ha-manager set vm:100 --state disabled | # ha-manager set vm:100 --state disabled | ||
| Line 485: | Line 533: | ||
after you fixed all errors you may request that the service starts again | after you fixed all errors you may request that the service starts again | ||
Package Updates | Package Updates | ||
When updating the ha-manager you should do one node after the other, never | When updating the ha-manager, you should do one node after the other, never | ||
all at once for various reasons. First, while we test our software | all at once for various reasons. First, while we test our software | ||
thoroughly, a bug affecting your specific setup cannot totally be ruled out. | |||
Updating one node after the other and checking the functionality of each node | |||
after finishing the update helps to recover from | after finishing the update helps to recover from eventual problems, while | ||
updating all could | updating all at once could result in a broken cluster and is generally not | ||
good practice. | good practice. | ||
Also, the Proxmox VE HA stack uses a request acknowledge protocol to perform | Also, the Proxmox VE HA stack uses a request acknowledge protocol to perform | ||
actions between the cluster and the local resource manager. For restarting, | actions between the cluster and the local resource manager. For restarting, | ||
the LRM makes a request to the CRM to freeze all its services. This prevents | the LRM makes a request to the CRM to freeze all its services. This prevents | ||
them from getting touched by the Cluster during the short time the LRM is restarting. | |||
After that the LRM may safely close the watchdog during a restart. | After that, the LRM may safely close the watchdog during a restart. | ||
Such a restart happens | Such a restart happens normally during a package update and, as already stated, | ||
CRM is needed to acknowledge the requests from the LRM | an active master CRM is needed to acknowledge the requests from the LRM. If | ||
the update process can | this is not the case the update process can take too long which, in the worst | ||
a watchdog | case, may result in a reset triggered by the watchdog. | ||
Node Maintenance | Node Maintenance | ||
Sometimes it is necessary to perform maintenance on a node, such as replacing | |||
maintenance | hardware or simply installing a new kernel image. This also applies while the | ||
HA stack is in use. | |||
The HA stack can support you mainly in two types of maintenance: | |||
for general shutdowns or reboots, the behavior can be configured, see | |||
Shutdown Policy. | |||
for maintenance that does not require a shutdown or reboot, or that should | |||
not be switched off automatically after only one reboot, you can enable the | |||
manual maintenance mode. | |||
Maintenance Mode | |||
You can use the manual maintenance mode to mark the node as unavailable for HA | |||
operation, prompting all services managed by HA to migrate to other nodes. | |||
The target nodes for these migrations are selected from the other currently | |||
available nodes, and determined by the HA group configuration and the configured | |||
cluster resource scheduler (CRS) mode. | |||
During each migration, the original node will be recorded in the HA managers' | |||
state, so that the service can be moved back again automatically once the | |||
maintenance mode is disabled and the node is back online. | |||
Currently you can enabled or disable the maintenance mode using the ha-manager | |||
CLI tool. | |||
Enabling maintenance mode for a node | |||
# ha-manager crm-command node-maintenance enable NODENAME | |||
This will queue a CRM command, when the manager processes this command it will | |||
record the request for maintenance-mode in the manager status. This allows you | |||
to submit the command on any node, not just on the one you want to place in, or | |||
out of the maintenance mode. | |||
Once the LRM on the respective node picks the command up it will mark itself as | |||
unavailable, but still process all migration commands. This means that the LRM | |||
self-fencing watchdog will stay active until all active services got moved, and | |||
all running workers finished. | |||
Note that the LRM status will read maintenance mode as soon as the LRM | |||
picked the requested state up, not only when all services got moved away, this | |||
user experience is planned to be improved in the future. | |||
For now, you can check for any active HA service left on the node, or watching | |||
out for a log line like: pve-ha-lrm[PID]: watchdog closed (disabled) to know | |||
when the node finished its transition into the maintenance mode. | |||
The manual maintenance mode is not automatically deleted on node reboot, | |||
but only if it is either manually deactivated using the ha-manager CLI or if | |||
the manager-status is manually cleared. | |||
Disabling maintenance mode for a node | |||
# ha-manager crm-command node-maintenance disable NODENAME | |||
The process of disabling the manual maintenance mode is similar to enabling it. | |||
Using the ha-manager CLI command shown above will queue a CRM command that, | |||
once processed, marks the respective LRM node as available again. | |||
If you deactivate the maintenance mode, all services that were on the node when | |||
the maintenance mode was activated will be moved back. | |||
Shutdown Policy | |||
Below you will find a description of the different HA policies for a node | |||
shutdown. Currently Conditional is the default due to backward compatibility. | |||
Some users may find that Migrate behaves more as expected. | |||
The shutdown policy can be configured in the Web UI (Datacenter → Options | |||
→ HA Settings), or directly in datacenter.cfg: | |||
ha: shutdown_policy=<value> | |||
Migrate | |||
Once the Local Resource manager (LRM) gets a shutdown request and this policy | |||
is enabled, it will mark itself as unavailable for the current HA manager. | |||
This triggers a migration of all HA Services currently located on this node. | |||
The LRM will try to delay the shutdown process, until all running services get | |||
moved away. But, this expects that the running services can be migrated to | |||
another node. In other words, the service must not be locally bound, for example | |||
by using hardware passthrough. As non-group member nodes are considered as | |||
runnable target if no group member is available, this policy can still be used | |||
when making use of HA groups with only some nodes selected. But, marking a group | |||
as restricted tells the HA manager that the service cannot run outside of the | |||
chosen set of nodes. If all of those nodes are unavailable, the shutdown will | |||
hang until you manually intervene. Once the shut down node comes back online | |||
again, the previously displaced services will be moved back, if they were not | |||
already manually migrated in-between. | |||
The watchdog is still active during the migration process on shutdown. | |||
If the node loses quorum it will be fenced and the services will be recovered. | |||
If you start a (previously stopped) service on a node which is currently being | |||
maintained, the node needs to be fenced to ensure that the service can be moved | |||
and started on another available node. | |||
Failover | |||
This mode ensures that all services get stopped, but that they will also be | |||
recovered, if the current node is not online soon. It can be useful when doing | |||
maintenance on a cluster scale, where live-migrating VMs may not be possible if | |||
too many nodes are powered off at a time, but you still want to ensure HA | |||
services get recovered and started again as soon as possible. | |||
Freeze | |||
This mode ensures that all services get stopped and frozen, so that they won’t | |||
get recovered until the current node is online again. | |||
Conditional | |||
The Conditional shutdown policy automatically detects if a shutdown or a | |||
reboot is requested, and changes behaviour accordingly. | |||
Shutdown | Shutdown | ||
A shutdown (poweroff) is usually done if the node | A shutdown (poweroff) is usually done if it is planned for the node to stay | ||
down for some time. The LRM stops all managed services in | down for some time. The LRM stops all managed services in this case. This means | ||
case. This means that other nodes will take over those | that other nodes will take over those services afterwards. | ||
afterwards. | Recent hardware has large amounts of memory (RAM). So we stop all | ||
Recent hardware has large amounts of RAM. So we stop all | resources, then restart them to avoid online migration of all that RAM. If you | ||
resources, then restart them to avoid online migration of all that | want to use online migration, you need to invoke that manually before you | ||
RAM. If you want to use online migration, you need to invoke that | shutdown the node. | ||
manually before you shutdown the node. | |||
Reboot | Reboot | ||
Node reboots are initiated with the reboot command. This is usually | Node reboots are initiated with the reboot command. This is usually done | ||
after installing a new kernel. Please note that this is different from | |||
“shutdown”, because the node immediately starts again. | |||
The LRM tells the CRM that it wants to restart, and waits until the | The LRM tells the CRM that it wants to restart, and waits until the CRM puts | ||
CRM puts all resources into the freeze state (same mechanism is used | all resources into the freeze state (same mechanism is used for | ||
Package Updates). This prevents those resources | |||
from being moved to other nodes. Instead, the CRM starts the resources after the | |||
the resources after the reboot on the same node. | reboot on the same node. | ||
Manual Resource Movement | Manual Resource Movement | ||
Last but not least, you can also move resources | Last but not least, you can also manually move resources to other nodes, before | ||
nodes before you shutdown or restart a node. The advantage is that you | you shutdown or restart a node. The advantage is that you have full control, | ||
have full control, and you can decide if you want to use online | and you can decide if you want to use online migration or not. | ||
migration or not. | |||
Please do not kill services like pve-ha-crm, pve-ha-lrm or | Please do not kill services like pve-ha-crm, pve-ha-lrm or | ||
watchdog-mux. They manage and use the watchdog, so this can result | watchdog-mux. They manage and use the watchdog, so this can result in an | ||
in a node | immediate node reboot or even reset. | ||
Cluster Resource Scheduling | |||
The cluster resource scheduler (CRS) mode controls how HA selects nodes for the | |||
recovery of a service as well as for migrations that are triggered by a | |||
shutdown policy. The default mode is basic, you can change it in the Web UI | |||
(Datacenter → Options), or directly in datacenter.cfg: | |||
crs: ha=static | |||
The change will be in effect starting with the next manager round (after a few | |||
seconds). | |||
For each service that needs to be recovered or migrated, the scheduler | |||
iteratively chooses the best node among the nodes with the highest priority in | |||
the service’s group. | |||
There are plans to add modes for (static and dynamic) load-balancing in | |||
the future. | |||
Basic Scheduler | |||
The number of active HA services on each node is used to choose a recovery node. | |||
Non-HA-managed services are currently not counted. | |||
Static-Load Scheduler | |||
The static mode is still a technology preview. | |||
Static usage information from HA services on each node is used to choose a | |||
recovery node. Usage of non-HA-managed services is currently not considered. | |||
For this selection, each node in turn is considered as if the service was | |||
already running on it, using CPU and memory usage from the associated guest | |||
configuration. Then for each such alternative, CPU and memory usage of all nodes | |||
are considered, with memory being weighted much more, because it’s a truly | |||
limited resource. For both, CPU and memory, highest usage among nodes (weighted | |||
more, as ideally no node should be overcommitted) and average usage of all nodes | |||
(to still be able to distinguish in case there already is a more highly | |||
committed node) are considered. | |||
The more services the more possible combinations there are, so it’s | |||
currently not recommended to use it if you have thousands of HA managed | |||
services. | |||
CRS Scheduling Points | |||
The CRS algorithm is not applied for every service in every round, since this | |||
would mean a large number of constant migrations. Depending on the workload, | |||
this could put more strain on the cluster than could be avoided by constant | |||
balancing. | |||
That’s why the Proxmox VE HA manager favors keeping services on their current node. | |||
The CRS is currently used at the following scheduling points: | |||
Service recovery (always active). When a node with active HA services fails, | |||
all its services need to be recovered to other nodes. The CRS algorithm will | |||
be used here to balance that recovery over the remaining nodes. | |||
HA group config changes (always active). If a node is removed from a group, | |||
or its priority is reduced, the HA stack will use the CRS algorithm to find a | |||
new target node for the HA services in that group, matching the adapted | |||
priority constraints. | |||
HA service stopped → start transition (opt-in). Requesting that a stopped | |||
service should be started is an good opportunity to check for the best suited | |||
node as per the CRS algorithm, as moving stopped services is cheaper to do | |||
than moving them started, especially if their disk volumes reside on shared | |||
storage. You can enable this by setting the ha-rebalance-on-start | |||
CRS option in the datacenter config. You can change that option also in the | |||
Web UI, under Datacenter → Options → Cluster Resource Scheduling. | |||
</pvehide> | </pvehide> | ||
<!--PVE_IMPORT_END_MARKER--> | <!--PVE_IMPORT_END_MARKER--> | ||
Latest revision as of 12:09, 28 November 2024
Contents
Our modern society depends heavily on information provided by computers over the network. Mobile devices amplified that dependency, because people can access the network any time from anywhere. If you provide such services, it is very important that they are available most of the time.
We can mathematically define the availability as the ratio of (A), the total time a service is capable of being used during a given interval to (B), the length of the interval. It is normally expressed as a percentage of uptime in a given year.
| Availability % | Downtime per year |
|---|---|
99 |
3.65 days |
99.9 |
8.76 hours |
99.99 |
52.56 minutes |
99.999 |
5.26 minutes |
99.9999 |
31.5 seconds |
99.99999 |
3.15 seconds |
There are several ways to increase availability. The most elegant solution is to rewrite your software, so that you can run it on several hosts at the same time. The software itself needs to have a way to detect errors and do failover. If you only want to serve read-only web pages, then this is relatively simple. However, this is generally complex and sometimes impossible, because you cannot modify the software yourself. The following solutions works without modifying the software:
-
Use reliable “server” components

Computer components with the same functionality can have varying reliability numbers, depending on the component quality. Most vendors sell components with higher reliability as “server” components - usually at higher price. -
Eliminate single point of failure (redundant components)
-
use an uninterruptible power supply (UPS)
-
use redundant power supplies in your servers
-
use ECC-RAM
-
use redundant network hardware
-
use RAID for local storage
-
use distributed, redundant storage for VM data
-
-
Reduce downtime
-
rapidly accessible administrators (24/7)
-
availability of spare parts (other nodes in a Proxmox VE cluster)
-
automatic error detection (provided by ha-manager)
-
automatic failover (provided by ha-manager)
-
Virtualization environments like Proxmox VE make it much easier to reach high availability because they remove the “hardware” dependency. They also support the setup and use of redundant storage and network devices, so if one host fails, you can simply start those services on another host within your cluster.
Better still, Proxmox VE provides a software stack called ha-manager, which can do that automatically for you. It is able to automatically detect errors and do automatic failover.
Proxmox VE ha-manager works like an “automated” administrator. First, you configure what resources (VMs, containers, …) it should manage. Then, ha-manager observes the correct functionality, and handles service failover to another node in case of errors. ha-manager can also handle normal user requests which may start, stop, relocate and migrate a service.
But high availability comes at a price. High quality components are more expensive, and making them redundant doubles the costs at least. Additional spare parts increase costs further. So you should carefully calculate the benefits, and compare with those additional costs.

|
Increasing availability from 99% to 99.9% is relatively simple. But increasing availability from 99.9999% to 99.99999% is very hard and costly. ha-manager has typical error detection and failover times of about 2 minutes, so you can get no more than 99.999% availability. |
Requirements
You must meet the following requirements before you start with HA:
-
at least three cluster nodes (to get reliable quorum)
-
shared storage for VMs and containers
-
hardware redundancy (everywhere)
-
use reliable “server” components
-
hardware watchdog - if not available we fall back to the linux kernel software watchdog (softdog)
-
optional hardware fencing devices
Resources
We call the primary management unit handled by ha-manager a resource. A resource (also called “service”) is uniquely identified by a service ID (SID), which consists of the resource type and a type specific ID, for example vm:100. That example would be a resource of type vm (virtual machine) with the ID 100.
For now we have two important resources types - virtual machines and containers. One basic idea here is that we can bundle related software into such a VM or container, so there is no need to compose one big service from other services, as was done with rgmanager. In general, a HA managed resource should not depend on other resources.
Management Tasks
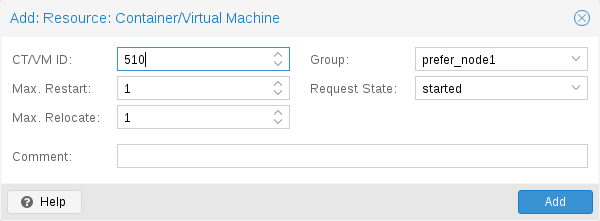
This section provides a short overview of common management tasks. The first step is to enable HA for a resource. This is done by adding the resource to the HA resource configuration. You can do this using the GUI, or simply use the command-line tool, for example:
# ha-manager add vm:100
The HA stack now tries to start the resources and keep them running. Please note that you can configure the “requested” resources state. For example you may want the HA stack to stop the resource:
# ha-manager set vm:100 --state stopped
and start it again later:
# ha-manager set vm:100 --state started
You can also use the normal VM and container management commands. They automatically forward the commands to the HA stack, so
# qm start 100
simply sets the requested state to started. The same applies to qm stop, which sets the requested state to stopped.
|
|
The HA stack works fully asynchronous and needs to communicate with other cluster members. Therefore, it takes some seconds until you see the result of such actions. |
To view the current HA resource configuration use:
# ha-manager config
vm:100
state stopped
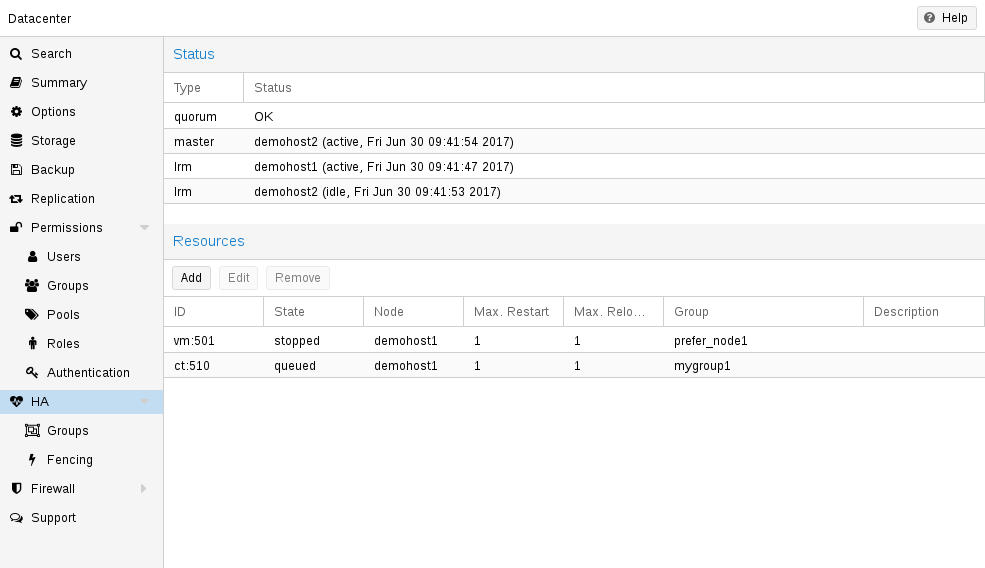
And you can view the actual HA manager and resource state with:
# ha-manager status quorum OK master node1 (active, Wed Nov 23 11:07:23 2016) lrm elsa (active, Wed Nov 23 11:07:19 2016) service vm:100 (node1, started)
You can also initiate resource migration to other nodes:
# ha-manager migrate vm:100 node2
This uses online migration and tries to keep the VM running. Online migration needs to transfer all used memory over the network, so it is sometimes faster to stop the VM, then restart it on the new node. This can be done using the relocate command:
# ha-manager relocate vm:100 node2
Finally, you can remove the resource from the HA configuration using the following command:
# ha-manager remove vm:100
|
|
This does not start or stop the resource. |
But all HA related tasks can be done in the GUI, so there is no need to use the command line at all.
How It Works
This section provides a detailed description of the Proxmox VE HA manager internals. It describes all involved daemons and how they work together. To provide HA, two daemons run on each node:
- pve-ha-lrm
-
The local resource manager (LRM), which controls the services running on the local node. It reads the requested states for its services from the current manager status file and executes the respective commands.
- pve-ha-crm
-
The cluster resource manager (CRM), which makes the cluster-wide decisions. It sends commands to the LRM, processes the results, and moves resources to other nodes if something fails. The CRM also handles node fencing.
|
|
Locks in the LRM & CRM Locks are provided by our distributed configuration file system (pmxcfs).
They are used to guarantee that each LRM is active once and working. As an
LRM only executes actions when it holds its lock, we can mark a failed node
as fenced if we can acquire its lock. This then lets us recover any failed
HA services securely without any interference from the now unknown failed node.
This all gets supervised by the CRM which currently holds the manager master
lock. |
Service States
The CRM uses a service state enumeration to record the current service state. This state is displayed on the GUI and can be queried using the ha-manager command-line tool:
# ha-manager status quorum OK master elsa (active, Mon Nov 21 07:23:29 2016) lrm elsa (active, Mon Nov 21 07:23:22 2016) service ct:100 (elsa, stopped) service ct:102 (elsa, started) service vm:501 (elsa, started)
Here is the list of possible states:
- stopped
-
Service is stopped (confirmed by LRM). If the LRM detects a stopped service is still running, it will stop it again.
- request_stop
-
Service should be stopped. The CRM waits for confirmation from the LRM.
- stopping
-
Pending stop request. But the CRM did not get the request so far.
- started
-
Service is active an LRM should start it ASAP if not already running. If the Service fails and is detected to be not running the LRM restarts it (see Start Failure Policy).
- starting
-
Pending start request. But the CRM has not got any confirmation from the LRM that the service is running.
- fence
-
Wait for node fencing as the service node is not inside the quorate cluster partition (see Fencing). As soon as node gets fenced successfully the service will be placed into the recovery state.
- recovery
-
Wait for recovery of the service. The HA manager tries to find a new node where the service can run on. This search depends not only on the list of online and quorate nodes, but also if the service is a group member and how such a group is limited. As soon as a new available node is found, the service will be moved there and initially placed into stopped state. If it’s configured to run the new node will do so.
- freeze
-
Do not touch the service state. We use this state while we reboot a node, or when we restart the LRM daemon (see Package Updates).
- ignored
-
Act as if the service were not managed by HA at all. Useful, when full control over the service is desired temporarily, without removing it from the HA configuration.
- migrate
-
Migrate service (live) to other node.
- error
-
Service is disabled because of LRM errors. Needs manual intervention (see Error Recovery).
- queued
-
Service is newly added, and the CRM has not seen it so far.
- disabled
-
Service is stopped and marked as disabled
Local Resource Manager
The local resource manager (pve-ha-lrm) is started as a daemon on boot and waits until the HA cluster is quorate and thus cluster-wide locks are working.
It can be in three states:
- wait for agent lock
-
The LRM waits for our exclusive lock. This is also used as idle state if no service is configured.
- active
-
The LRM holds its exclusive lock and has services configured.
- lost agent lock
-
The LRM lost its lock, this means a failure happened and quorum was lost.
After the LRM gets in the active state it reads the manager status file in /etc/pve/ha/manager_status and determines the commands it has to execute for the services it owns. For each command a worker gets started, these workers are running in parallel and are limited to at most 4 by default. This default setting may be changed through the datacenter configuration key max_worker. When finished the worker process gets collected and its result saved for the CRM.
|
|
Maximum Concurrent Worker Adjustment Tips The default value of at most 4 concurrent workers may be unsuited for
a specific setup. For example, 4 live migrations may occur at the same
time, which can lead to network congestions with slower networks and/or
big (memory wise) services. Also, ensure that in the worst case, congestion is
at a minimum, even if this means lowering the max_worker value. On the
contrary, if you have a particularly powerful, high-end setup you may also want
to increase it. |
Each command requested by the CRM is uniquely identifiable by a UID. When the worker finishes, its result will be processed and written in the LRM status file /etc/pve/nodes/<nodename>/lrm_status. There the CRM may collect it and let its state machine - respective to the commands output - act on it.
The actions on each service between CRM and LRM are normally always synced. This means that the CRM requests a state uniquely marked by a UID, the LRM then executes this action one time and writes back the result, which is also identifiable by the same UID. This is needed so that the LRM does not execute an outdated command. The only exceptions to this behaviour are the stop and error commands; these two do not depend on the result produced and are executed always in the case of the stopped state and once in the case of the error state.
|
|
Read the Logs The HA Stack logs every action it makes. This helps to understand what
and also why something happens in the cluster. Here its important to see
what both daemons, the LRM and the CRM, did. You may use
journalctl -u pve-ha-lrm on the node(s) where the service is and
the same command for the pve-ha-crm on the node which is the current master. |
Cluster Resource Manager
The cluster resource manager (pve-ha-crm) starts on each node and waits there for the manager lock, which can only be held by one node at a time. The node which successfully acquires the manager lock gets promoted to the CRM master.
It can be in three states:
- wait for agent lock
-
The CRM waits for our exclusive lock. This is also used as idle state if no service is configured
- active
-
The CRM holds its exclusive lock and has services configured
- lost agent lock
-
The CRM lost its lock, this means a failure happened and quorum was lost.
Its main task is to manage the services which are configured to be highly available and try to always enforce the requested state. For example, a service with the requested state started will be started if its not already running. If it crashes it will be automatically started again. Thus the CRM dictates the actions the LRM needs to execute.
When a node leaves the cluster quorum, its state changes to unknown. If the current CRM can then secure the failed node’s lock, the services will be stolen and restarted on another node.
When a cluster member determines that it is no longer in the cluster quorum, the LRM waits for a new quorum to form. As long as there is no quorum the node cannot reset the watchdog. This will trigger a reboot after the watchdog times out (this happens after 60 seconds).
HA Simulator
By using the HA simulator you can test and learn all functionalities of the Proxmox VE HA solutions.
By default, the simulator allows you to watch and test the behaviour of a real-world 3 node cluster with 6 VMs. You can also add or remove additional VMs or Container.
You do not have to setup or configure a real cluster, the HA simulator runs out of the box.
Install with apt:
apt install pve-ha-simulator
You can even install the package on any Debian-based system without any other Proxmox VE packages. For that you will need to download the package and copy it to the system you want to run it on for installation. When you install the package with apt from the local file system it will also resolve the required dependencies for you.
To start the simulator on a remote machine you must have an X11 redirection to your current system.
If you are on a Linux machine you can use:
ssh root@<IPofPVE> -Y
On Windows it works with mobaxterm.
After connecting to an existing Proxmox VE with the simulator installed or installing it on your local Debian-based system manually, you can try it out as follows.
First you need to create a working directory where the simulator saves its current state and writes its default config:
mkdir working
Then, simply pass the created directory as a parameter to pve-ha-simulator:
pve-ha-simulator working/
You can then start, stop, migrate the simulated HA services, or even check out what happens on a node failure.
Configuration
The HA stack is well integrated into the Proxmox VE API. So, for example, HA can be configured via the ha-manager command-line interface, or the Proxmox VE web interface - both interfaces provide an easy way to manage HA. Automation tools can use the API directly.
All HA configuration files are within /etc/pve/ha/, so they get automatically distributed to the cluster nodes, and all nodes share the same HA configuration.
Resources
The resource configuration file /etc/pve/ha/resources.cfg stores the list of resources managed by ha-manager. A resource configuration inside that list looks like this:
<type>: <name>
<property> <value>
...
It starts with a resource type followed by a resource specific name, separated with colon. Together this forms the HA resource ID, which is used by all ha-manager commands to uniquely identify a resource (example: vm:100 or ct:101). The next lines contain additional properties:
- comment: <string>
-
Description.
- group: <string>
-
The HA group identifier.
- max_relocate: <integer> (0 - N) (default = 1)
-
Maximal number of service relocate tries when a service failes to start.
- max_restart: <integer> (0 - N) (default = 1)
-
Maximal number of tries to restart the service on a node after its start failed.
- state: <disabled | enabled | ignored | started | stopped> (default = started)
-
Requested resource state. The CRM reads this state and acts accordingly. Please note that enabled is just an alias for started.
- started
-
The CRM tries to start the resource. Service state is set to started after successful start. On node failures, or when start fails, it tries to recover the resource. If everything fails, service state it set to error.
- stopped
-
The CRM tries to keep the resource in stopped state, but it still tries to relocate the resources on node failures.
- disabled
-
The CRM tries to put the resource in stopped state, but does not try to relocate the resources on node failures. The main purpose of this state is error recovery, because it is the only way to move a resource out of the error state.
- ignored
-
The resource gets removed from the manager status and so the CRM and the LRM do not touch the resource anymore. All {pve} API calls affecting this resource will be executed, directly bypassing the HA stack. CRM commands will be thrown away while there source is in this state. The resource will not get relocated on node failures.
Here is a real world example with one VM and one container. As you see, the syntax of those files is really simple, so it is even possible to read or edit those files using your favorite editor:
vm: 501
state started
max_relocate 2
ct: 102
# Note: use default settings for everything
The above config was generated using the ha-manager command-line tool:
# ha-manager add vm:501 --state started --max_relocate 2 # ha-manager add ct:102
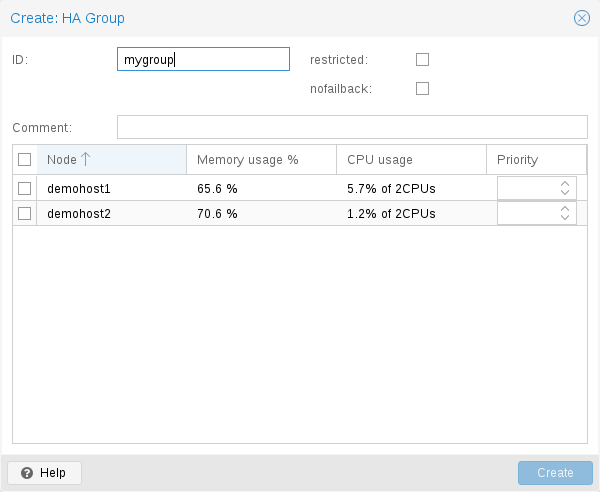
Groups
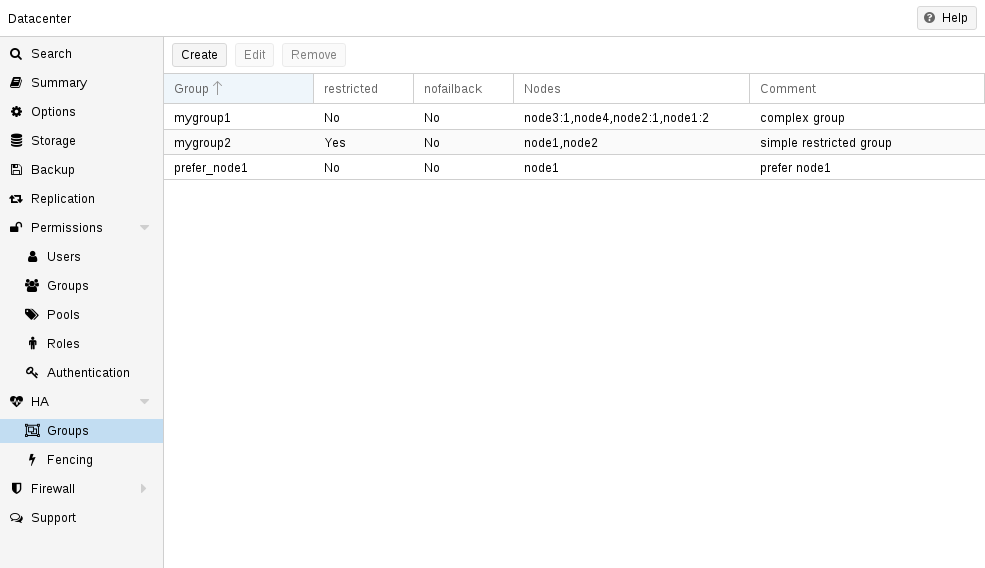
The HA group configuration file /etc/pve/ha/groups.cfg is used to define groups of cluster nodes. A resource can be restricted to run only on the members of such group. A group configuration look like this:
group: <group>
nodes <node_list>
<property> <value>
...
- comment: <string>
-
Description.
- nodes: <node>[:<pri>]{,<node>[:<pri>]}*
-
List of cluster node members, where a priority can be given to each node. A resource bound to a group will run on the available nodes with the highest priority. If there are more nodes in the highest priority class, the services will get distributed to those nodes. The priorities have a relative meaning only.
- nofailback: <boolean> (default = 0)
-
The CRM tries to run services on the node with the highest priority. If a node with higher priority comes online, the CRM migrates the service to that node. Enabling nofailback prevents that behavior.
- restricted: <boolean> (default = 0)
-
Resources bound to restricted groups may only run on nodes defined by the group. The resource will be placed in the stopped state if no group node member is online. Resources on unrestricted groups may run on any cluster node if all group members are offline, but they will migrate back as soon as a group member comes online. One can implement a preferred node behavior using an unrestricted group with only one member.
A common requirement is that a resource should run on a specific node. Usually the resource is able to run on other nodes, so you can define an unrestricted group with a single member:
# ha-manager groupadd prefer_node1 --nodes node1
For bigger clusters, it makes sense to define a more detailed failover behavior. For example, you may want to run a set of services on node1 if possible. If node1 is not available, you want to run them equally split on node2 and node3. If those nodes also fail, the services should run on node4. To achieve this you could set the node list to:
# ha-manager groupadd mygroup1 -nodes "node1:2,node2:1,node3:1,node4"
Another use case is if a resource uses other resources only available on specific nodes, lets say node1 and node2. We need to make sure that HA manager does not use other nodes, so we need to create a restricted group with said nodes:
# ha-manager groupadd mygroup2 -nodes "node1,node2" -restricted
The above commands created the following group configuration file:
group: prefer_node1
nodes node1
group: mygroup1
nodes node2:1,node4,node1:2,node3:1
group: mygroup2
nodes node2,node1
restricted 1
The nofailback options is mostly useful to avoid unwanted resource movements during administration tasks. For example, if you need to migrate a service to a node which doesn’t have the highest priority in the group, you need to tell the HA manager not to instantly move this service back by setting the nofailback option.
Another scenario is when a service was fenced and it got recovered to another node. The admin tries to repair the fenced node and brings it up online again to investigate the cause of failure and check if it runs stably again. Setting the nofailback flag prevents the recovered services from moving straight back to the fenced node.
Fencing
On node failures, fencing ensures that the erroneous node is guaranteed to be offline. This is required to make sure that no resource runs twice when it gets recovered on another node. This is a really important task, because without this, it would not be possible to recover a resource on another node.
If a node did not get fenced, it would be in an unknown state where it may have still access to shared resources. This is really dangerous! Imagine that every network but the storage one broke. Now, while not reachable from the public network, the VM still runs and writes to the shared storage.
If we then simply start up this VM on another node, we would get a dangerous race condition, because we write from both nodes. Such conditions can destroy all VM data and the whole VM could be rendered unusable. The recovery could also fail if the storage protects against multiple mounts.
How Proxmox VE Fences
There are different methods to fence a node, for example, fence devices which cut off the power from the node or disable their communication completely. Those are often quite expensive and bring additional critical components into a system, because if they fail you cannot recover any service.
We thus wanted to integrate a simpler fencing method, which does not require additional external hardware. This can be done using watchdog timers.
-
external power switches
-
isolate nodes by disabling complete network traffic on the switch
-
self fencing using watchdog timers
Watchdog timers have been widely used in critical and dependable systems since the beginning of microcontrollers. They are often simple, independent integrated circuits which are used to detect and recover from computer malfunctions.
During normal operation, ha-manager regularly resets the watchdog timer to prevent it from elapsing. If, due to a hardware fault or program error, the computer fails to reset the watchdog, the timer will elapse and trigger a reset of the whole server (reboot).
Recent server motherboards often include such hardware watchdogs, but these need to be configured. If no watchdog is available or configured, we fall back to the Linux Kernel softdog. While still reliable, it is not independent of the servers hardware, and thus has a lower reliability than a hardware watchdog.
Configure Hardware Watchdog
By default, all hardware watchdog modules are blocked for security reasons. They are like a loaded gun if not correctly initialized. To enable a hardware watchdog, you need to specify the module to load in /etc/default/pve-ha-manager, for example:
# select watchdog module (default is softdog) WATCHDOG_MODULE=iTCO_wdt
This configuration is read by the watchdog-mux service, which loads the specified module at startup.
Recover Fenced Services
After a node failed and its fencing was successful, the CRM tries to move services from the failed node to nodes which are still online.
The selection of nodes, on which those services gets recovered, is influenced by the resource group settings, the list of currently active nodes, and their respective active service count.
The CRM first builds a set out of the intersection between user selected nodes (from group setting) and available nodes. It then choose the subset of nodes with the highest priority, and finally select the node with the lowest active service count. This minimizes the possibility of an overloaded node.

|
On node failure, the CRM distributes services to the remaining nodes. This increases the service count on those nodes, and can lead to high load, especially on small clusters. Please design your cluster so that it can handle such worst case scenarios. |
Start Failure Policy
The start failure policy comes into effect if a service failed to start on a node one or more times. It can be used to configure how often a restart should be triggered on the same node and how often a service should be relocated, so that it has an attempt to be started on another node. The aim of this policy is to circumvent temporary unavailability of shared resources on a specific node. For example, if a shared storage isn’t available on a quorate node anymore, for instance due to network problems, but is still available on other nodes, the relocate policy allows the service to start nonetheless.
There are two service start recover policy settings which can be configured specific for each resource.
- max_restart
-
Maximum number of attempts to restart a failed service on the actual node. The default is set to one.
- max_relocate
-
Maximum number of attempts to relocate the service to a different node. A relocate only happens after the max_restart value is exceeded on the actual node. The default is set to one.
|
|
The relocate count state will only reset to zero when the service had at least one successful start. That means if a service is re-started without fixing the error only the restart policy gets repeated. |
Error Recovery
If, after all attempts, the service state could not be recovered, it gets placed in an error state. In this state, the service won’t get touched by the HA stack anymore. The only way out is disabling a service:
# ha-manager set vm:100 --state disabled
This can also be done in the web interface.
To recover from the error state you should do the following:
-
bring the resource back into a safe and consistent state (e.g.: kill its process if the service could not be stopped)
-
disable the resource to remove the error flag
-
fix the error which led to this failures
-
after you fixed all errors you may request that the service starts again
Package Updates
When updating the ha-manager, you should do one node after the other, never all at once for various reasons. First, while we test our software thoroughly, a bug affecting your specific setup cannot totally be ruled out. Updating one node after the other and checking the functionality of each node after finishing the update helps to recover from eventual problems, while updating all at once could result in a broken cluster and is generally not good practice.
Also, the Proxmox VE HA stack uses a request acknowledge protocol to perform actions between the cluster and the local resource manager. For restarting, the LRM makes a request to the CRM to freeze all its services. This prevents them from getting touched by the Cluster during the short time the LRM is restarting. After that, the LRM may safely close the watchdog during a restart. Such a restart happens normally during a package update and, as already stated, an active master CRM is needed to acknowledge the requests from the LRM. If this is not the case the update process can take too long which, in the worst case, may result in a reset triggered by the watchdog.
Node Maintenance
Sometimes it is necessary to perform maintenance on a node, such as replacing hardware or simply installing a new kernel image. This also applies while the HA stack is in use.
The HA stack can support you mainly in two types of maintenance:
-
for general shutdowns or reboots, the behavior can be configured, see Shutdown Policy.
-
for maintenance that does not require a shutdown or reboot, or that should not be switched off automatically after only one reboot, you can enable the manual maintenance mode.
Maintenance Mode
You can use the manual maintenance mode to mark the node as unavailable for HA operation, prompting all services managed by HA to migrate to other nodes.
The target nodes for these migrations are selected from the other currently available nodes, and determined by the HA group configuration and the configured cluster resource scheduler (CRS) mode. During each migration, the original node will be recorded in the HA managers' state, so that the service can be moved back again automatically once the maintenance mode is disabled and the node is back online.
Currently you can enabled or disable the maintenance mode using the ha-manager CLI tool.
# ha-manager crm-command node-maintenance enable NODENAME
This will queue a CRM command, when the manager processes this command it will record the request for maintenance-mode in the manager status. This allows you to submit the command on any node, not just on the one you want to place in, or out of the maintenance mode.
Once the LRM on the respective node picks the command up it will mark itself as unavailable, but still process all migration commands. This means that the LRM self-fencing watchdog will stay active until all active services got moved, and all running workers finished.
Note that the LRM status will read maintenance mode as soon as the LRM picked the requested state up, not only when all services got moved away, this user experience is planned to be improved in the future. For now, you can check for any active HA service left on the node, or watching out for a log line like: pve-ha-lrm[PID]: watchdog closed (disabled) to know when the node finished its transition into the maintenance mode.
|
|
The manual maintenance mode is not automatically deleted on node reboot, but only if it is either manually deactivated using the ha-manager CLI or if the manager-status is manually cleared. |
# ha-manager crm-command node-maintenance disable NODENAME
The process of disabling the manual maintenance mode is similar to enabling it. Using the ha-manager CLI command shown above will queue a CRM command that, once processed, marks the respective LRM node as available again.
If you deactivate the maintenance mode, all services that were on the node when the maintenance mode was activated will be moved back.
Shutdown Policy
Below you will find a description of the different HA policies for a node shutdown. Currently Conditional is the default due to backward compatibility. Some users may find that Migrate behaves more as expected.
The shutdown policy can be configured in the Web UI (Datacenter → Options → HA Settings), or directly in datacenter.cfg:
ha: shutdown_policy=<value>
Migrate
Once the Local Resource manager (LRM) gets a shutdown request and this policy is enabled, it will mark itself as unavailable for the current HA manager. This triggers a migration of all HA Services currently located on this node. The LRM will try to delay the shutdown process, until all running services get moved away. But, this expects that the running services can be migrated to another node. In other words, the service must not be locally bound, for example by using hardware passthrough. As non-group member nodes are considered as runnable target if no group member is available, this policy can still be used when making use of HA groups with only some nodes selected. But, marking a group as restricted tells the HA manager that the service cannot run outside of the chosen set of nodes. If all of those nodes are unavailable, the shutdown will hang until you manually intervene. Once the shut down node comes back online again, the previously displaced services will be moved back, if they were not already manually migrated in-between.
|
|
The watchdog is still active during the migration process on shutdown. If the node loses quorum it will be fenced and the services will be recovered. |
If you start a (previously stopped) service on a node which is currently being maintained, the node needs to be fenced to ensure that the service can be moved and started on another available node.
Failover
This mode ensures that all services get stopped, but that they will also be recovered, if the current node is not online soon. It can be useful when doing maintenance on a cluster scale, where live-migrating VMs may not be possible if too many nodes are powered off at a time, but you still want to ensure HA services get recovered and started again as soon as possible.
Freeze
This mode ensures that all services get stopped and frozen, so that they won’t get recovered until the current node is online again.
Conditional
The Conditional shutdown policy automatically detects if a shutdown or a reboot is requested, and changes behaviour accordingly.
Shutdown
A shutdown (poweroff) is usually done if it is planned for the node to stay down for some time. The LRM stops all managed services in this case. This means that other nodes will take over those services afterwards.
|
|
Recent hardware has large amounts of memory (RAM). So we stop all resources, then restart them to avoid online migration of all that RAM. If you want to use online migration, you need to invoke that manually before you shutdown the node. |
Reboot
Node reboots are initiated with the reboot command. This is usually done after installing a new kernel. Please note that this is different from “shutdown”, because the node immediately starts again.
The LRM tells the CRM that it wants to restart, and waits until the CRM puts all resources into the freeze state (same mechanism is used for Package Updates). This prevents those resources from being moved to other nodes. Instead, the CRM starts the resources after the reboot on the same node.
Manual Resource Movement
Last but not least, you can also manually move resources to other nodes, before you shutdown or restart a node. The advantage is that you have full control, and you can decide if you want to use online migration or not.
|
|
Please do not kill services like pve-ha-crm, pve-ha-lrm or watchdog-mux. They manage and use the watchdog, so this can result in an immediate node reboot or even reset. |
Cluster Resource Scheduling
The cluster resource scheduler (CRS) mode controls how HA selects nodes for the recovery of a service as well as for migrations that are triggered by a shutdown policy. The default mode is basic, you can change it in the Web UI (Datacenter → Options), or directly in datacenter.cfg:
crs: ha=static
The change will be in effect starting with the next manager round (after a few seconds).
For each service that needs to be recovered or migrated, the scheduler iteratively chooses the best node among the nodes with the highest priority in the service’s group.
|
|
There are plans to add modes for (static and dynamic) load-balancing in the future. |
Basic Scheduler
The number of active HA services on each node is used to choose a recovery node. Non-HA-managed services are currently not counted.
Static-Load Scheduler

|
The static mode is still a technology preview. |
Static usage information from HA services on each node is used to choose a recovery node. Usage of non-HA-managed services is currently not considered.
For this selection, each node in turn is considered as if the service was already running on it, using CPU and memory usage from the associated guest configuration. Then for each such alternative, CPU and memory usage of all nodes are considered, with memory being weighted much more, because it’s a truly limited resource. For both, CPU and memory, highest usage among nodes (weighted more, as ideally no node should be overcommitted) and average usage of all nodes (to still be able to distinguish in case there already is a more highly committed node) are considered.
|
|
The more services the more possible combinations there are, so it’s currently not recommended to use it if you have thousands of HA managed services. |
CRS Scheduling Points
The CRS algorithm is not applied for every service in every round, since this would mean a large number of constant migrations. Depending on the workload, this could put more strain on the cluster than could be avoided by constant balancing. That’s why the Proxmox VE HA manager favors keeping services on their current node.
The CRS is currently used at the following scheduling points:
-
Service recovery (always active). When a node with active HA services fails, all its services need to be recovered to other nodes. The CRS algorithm will be used here to balance that recovery over the remaining nodes.
-
HA group config changes (always active). If a node is removed from a group, or its priority is reduced, the HA stack will use the CRS algorithm to find a new target node for the HA services in that group, matching the adapted priority constraints.
-
HA service stopped → start transition (opt-in). Requesting that a stopped service should be started is an good opportunity to check for the best suited node as per the CRS algorithm, as moving stopped services is cheaper to do than moving them started, especially if their disk volumes reside on shared storage. You can enable this by setting the ha-rebalance-on-start CRS option in the datacenter config. You can change that option also in the Web UI, under Datacenter → Options → Cluster Resource Scheduling.